|
I am a fourth-year Computer Science PhD student at the University of Toronto, supervised by David Lindell. I am affiliated with both the Toronto Computational Imaging Group and the Vector Institute. My work has been previously recognized with the CVPR 2025 Best Student Paper Award. Previously, I completed my MRes at the Dyson Robotics Lab at Imperial College London, where I worked on self-supervised segmentation, under the supervision of Andrew Davison and Ronald Clark.
Email: |

|
|
2026-01
I was featured in a
Veritasium video,
discussing
Flying with Photons!
2025-09
I was featured in
The Executive Code
podcast!
2025-06
Neural Inverse Rendering from Propagating Light
won the
Best Student Paper Award
at CVPR 2025!
2025-06
Organizing the
Physics-inspired 3D Vision and Imaging (Pi3DVI)
workshop at CVPR 2025.
2025-04
Gave talks at the Stanford Graphics Seminar and the
Stanford Computational Imaging Lab.
2025-04
Neural Inverse Rendering from Propagating Light
accepted to CVPR 2025 as an Oral!
2025-03
Started an internship at
Apple Machine Learning Research
in Cupertino!
2024-09
Flying with Photons
accepted to ECCV 2024 as an Oral!
2023-10
TransientNeRF
accepted to NeurIPS 2023 as a Spotlight!
|
|
I am broadly interested in scene understanding. That is using visual cues to infer properites of objects and scenes. |

|
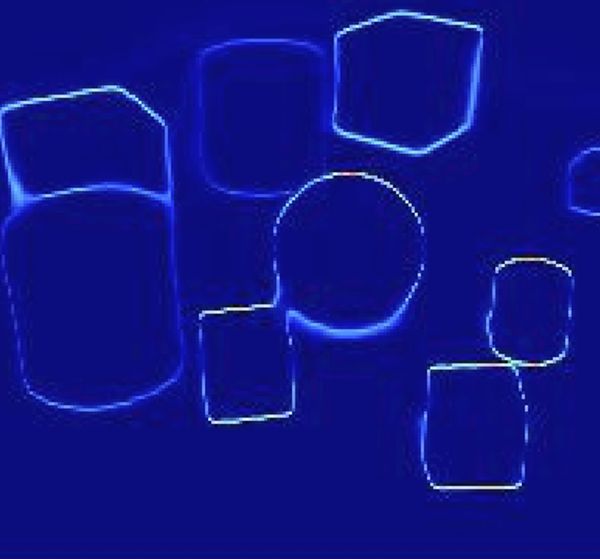
Anagh Malik, Dorian Chan, Xiaoming Zhao, David B. Lindell, Oncel Tuzel, Jen-Hao Rick Chang CVPR, 2026 project page / arXiv / code A framework for learning compact latent representations of dynamic 4D objects from unstructured point clouds, enabling video-to-4D generation, cloth simulation, and 3D point tracking. |
|
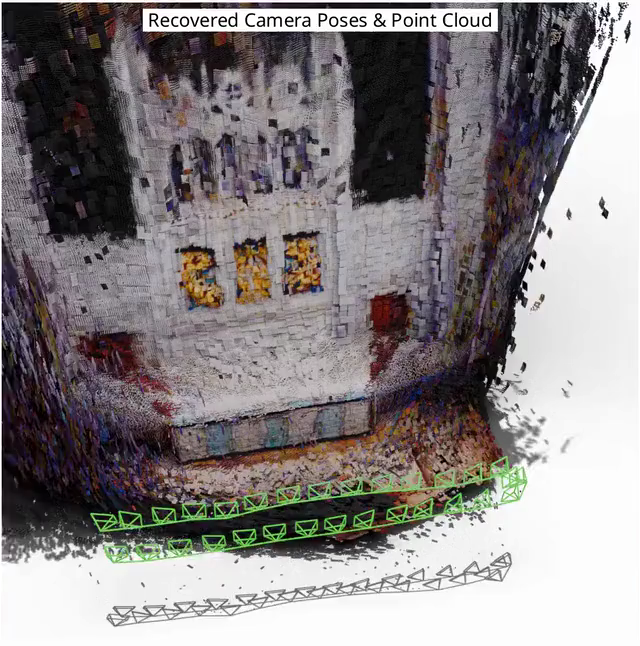
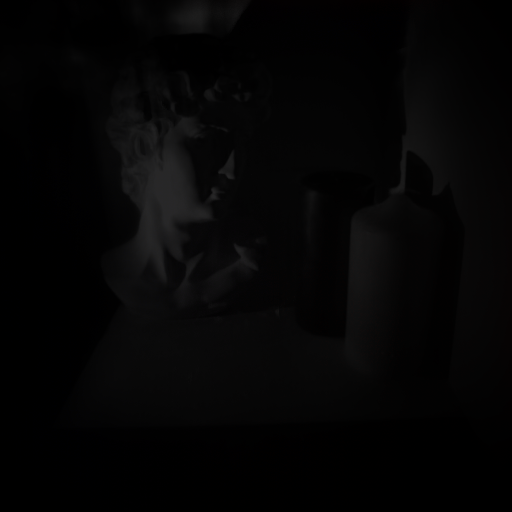
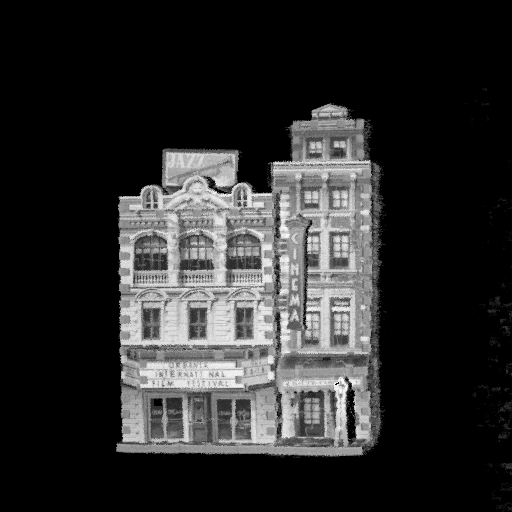
Andrew Y. Guo, Anagh Malik, SaiKiran Tedla, Yutong Dai, Yiqian Qin, Zach Salahe, Benjamin Attal, Sotiris Nousias, Kiriakos N. Kutulakos, David B. Lindell CVPR, 2026 (Highlight) project page / arXiv / code Recovers camera pose and depth maps from noisy low-light raw images for dense neural reconstruction, enabling accurate 3D scene recovery in extremely low-light conditions. |
|
Anagh Malik*, Benjamin Attal*, Andrew Xie, Matthew O'Toole, David B. Lindell CVPR, 2025 (Oral Presentation, Best Student Paper Award 🏆) project page / arXiv / code Time-resolved relighting and geometry estimation through radiance caching. |

|
Sotiris Nousias*, Mian Wei*, Howard Xiao, Maxx Wu, Shahmeer Athar, Kevin J. Wang, Anagh Malik, David A. Barmherzig, David B. Lindell, Kiriakos N. Kutulakos CVPR, 2025 (Oral Presentation) project page We propose a passive single‑photon method that opportunistically recovers time‑of‑flight from ambient pulsed light sources. |

|
Anagh Malik, Noah Juravsky, Ryan Po, Gordon Wetzstein, Kiriakos N. Kutulakos, David B. Lindell ECCV, 2024 (Oral Presentation) project page / video / arXiv / code Novel view synthesis of arbitrary light propagation videos - including effects such as scattering or interreflections. |
|
Anagh Malik, Parsa Mirdehghan, Sotiris Nousias, Kiriakos N. Kutulakos, David B. Lindell NeurIPS, 2023 (Spotlight) project page / video / arXiv / code We introduce a method to do novel view lidar synthesis, allowing sparse view scene reconstruction. |
|
Anagh Malik Master's Thesis, 2022 We develop a method for self-supervised segmentation through agreement and self-distillation. |
|
Anagh Malik, Shuaifeng Zhi, Marwan Taher, Ronald Clark, Andrew Davison Technical Report 2021 We train an encoder-decoder network to map from xy-coordinates to RGB values and semantic classes, allowing real-time segmentation of an image. |
|
Template stolen from Jon Barron's website.
|